
典型的弧焊机器人工作站主要包括:机器人系统(机器人主体,机器人控制柜,教学箱),焊接动力系统(焊接机,送丝机,焊炬,焊丝托架),焊枪防撞传感器,定位器,焊接工具系统(机械,电子控制,气动/液压),清理装置,控制系统(PLC控制柜,HMI触摸屏,控制台),安全系统(围栏,安全灯,安全锁)和排烟系统(自动清洁灰尘)清除设备,排气罩,管道)。弧焊机器人工作站通常使用双工位或多工位设计,使用气动/液压焊接夹具,机械手(焊接)和操作员(装卸)在工位之间交替工作。在操作员固定好工件后,按下控制台上的“开始”按钮,弧焊机器人将完成另一侧的焊接工作。它会自动传送到要焊接工件的安装位置,然后进行焊接。这样,您可以避免或减少机器人的等待时间并提高生产率。那么选择弧焊机器人要注意哪几点呢?
1)焊接机器人抓重量:由于焊枪和送丝机的重量较轻,因此焊接机器人通常要捡起3〜8kg的重量。如果使用激光跟踪传感器等,则还必须增加机器人的重量。
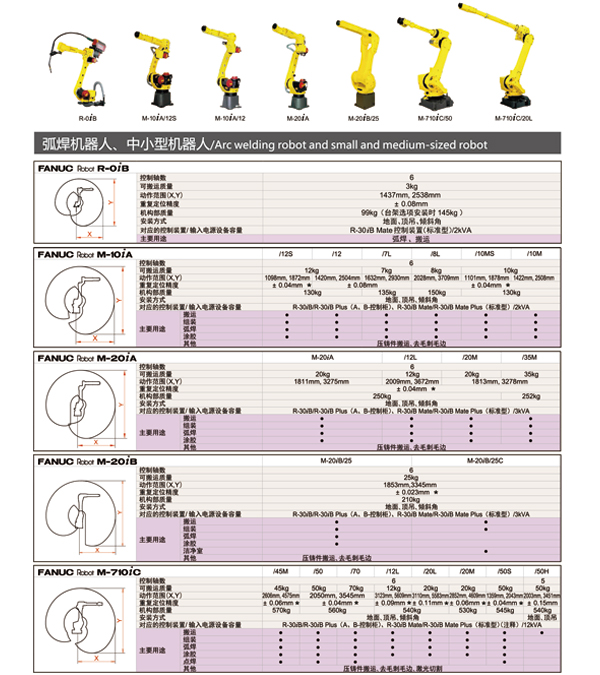
2)运动范围和结构:根据待焊接工件的尺寸,机器人的运动半径通常选择1.40至1.60m:由于焊接机器人的机械结构的影响,即使是具有相似连杆的焊接机器人具有不同的空间运动范围。通常,四连杆结构机器人的空间运动范围小于关节型焊接机器人的空间运动范围。
3)重复定位精度:大多数焊接机器人在0.05到0.1 mm之间,可以满足一般焊接要求。对于精细等离子或激光焊接,应选择精度更高的机器人。
4)具有焊接相关功能:摆动焊接功能,如单摆,三角形和梯形摆动;焊机接口功能,如模拟量,现场总线,网络接口等;焊接传感器接口功能,例如焊接位置检测,焊接跟踪等。
